51单片机学习(下)
本节是C51单片机系列学习的最后一节,本节的重点是I2C总线通信,数模转换与模数转换。I2C与串口通信一样,在MCU通信里占据非常大的一部分。基本上算是通过C51系列单片机学完了的一些基本操作与概念,回顾这段时间的学习,收获最大部分还是学会看原理图、GPIO、定时器、中断资源、串口通信、I2C总线、AD/DA(PWM)、还有各种芯片模块等内容,后面会通过STC 89C51做一些小型项目,或者继续学习STM32吧~
I2C 总线
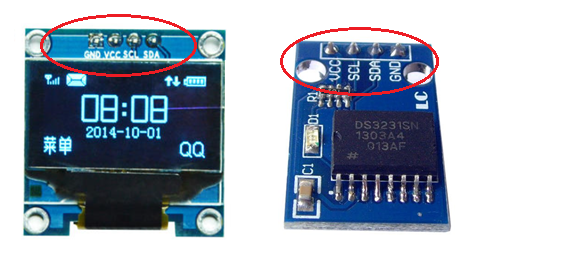
I2C是Inter-Integrated Circuit的简称,I2C是由Philips公司开发的一种通用数据总线,其中包括两根通信线:串行数据线:SDA,及串行时钟线:SCL。I2C通信的主要特征是同步、半双工,并且带数据应答。通用的I2C总线,可以使各种设备的通信标准统一,对于厂家来说,使用成熟的方案可以缩短芯片设计周期、提高稳定性,对于应用者来说,使用通用的通信协议可以避免学习各种各样的自定义协议,降低了学习和应用的难度。
I2C主要应用场景就是SOC和周边外设间的通信(如:EEPROM,电容触摸芯片,各种Sensor等)。
I2C电路规范
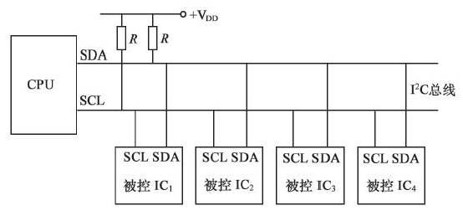
所有I2C设备的SCL连在一起,SDA连在一起;设备的SCL和SDA均要配置成开漏输出模式;SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右;开漏输出和上拉电阻的共同作用实现了“线与”的功能,此设计主要是为了解决多机通信互相干扰的问题。下面是I2C总线挂接多个设备示意图:
I2C总线内部结构图:
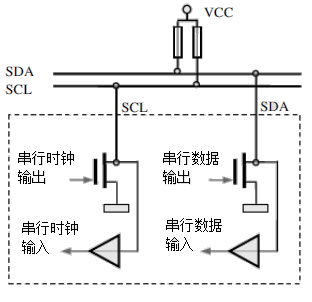
I2C使用一个7bit的设备地址,一组总线最多和112个节点通信。最大通信数量受限于地址空间及400pF的总线电容。常见的I2C总线以传输速率的不同分为不同的模式:标准模式(100Kbit/s)、低速模式(10Kbit/s)、快速模式(400Kbit/s)、高速模式(3.4Mbit/s),时钟频率可以被下降到零,即暂停通信。
该总线是一种多主控总线,即可以在总线上放置多个主设备节点,在停止位(P)发出后,即通讯结束后,主设备节点可以成为从设备节点。主设备节点 就是产生时钟并发起通信的设备节点;从设备节点 就是接收时钟并响应主设备节点寻址的设备节点。
总的来说I2C通信的主要特点如下:
1、I2C通信双方地位不对等,通信由主设备发起,并主导传输过程,从设备按I2C协议接收主设备发送的数据,并及时给出响应。
2、主设备、从设备由通信双方决定,既能当主设备,也能当从设备(需要软件进行配置)。
3、主设备负责调度总线,决定某一时刻和哪个从设备通信。在同一时刻,I2C总线上只能有一对主设备、从设备通信。
4、每个I2C从设备在I2C总线通讯中有一个I2C从设备地址,该地址具有唯一性,是从设备的固有属性,通信中主设备通过从设备地址来找到从设备,可以理解为网卡Mac地址。
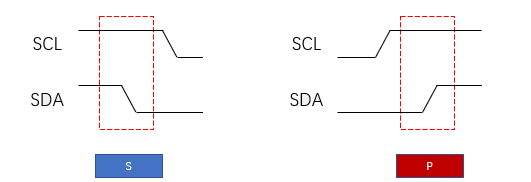
I2C时序结构
起始条件:SCL高电平期间,SDA从高电平切换到低电平。
终止条件:SCL高电平期间,SDA从低电平切换到高电平。
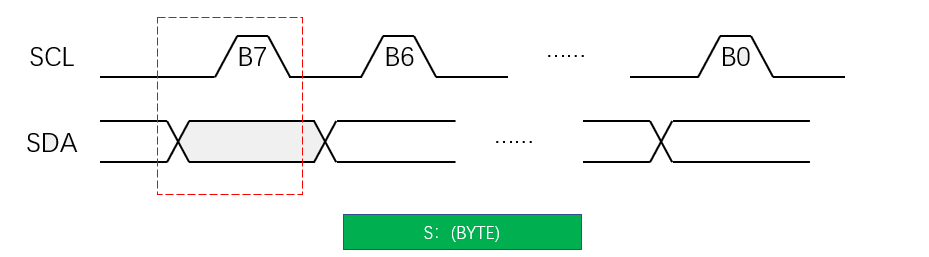
发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位在前),然后拉高SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节。
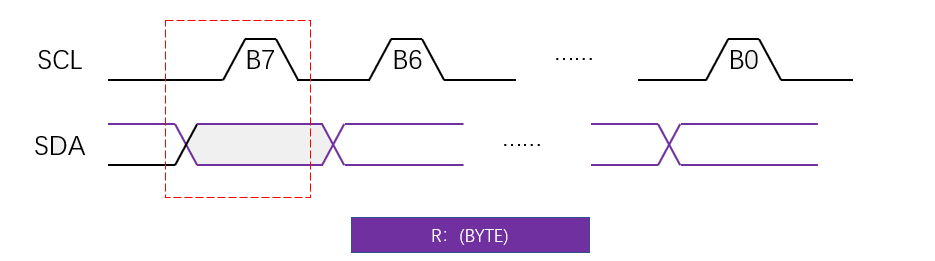
接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位在前),然后拉高SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)。
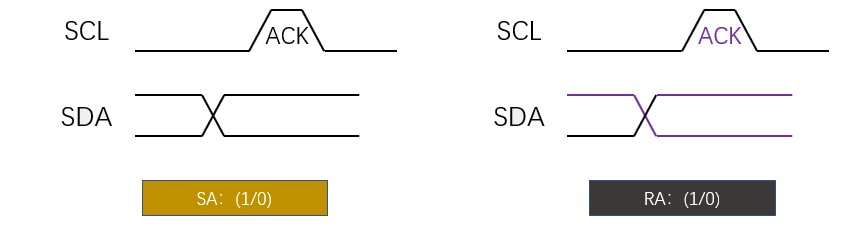
发送应答:在接收完一个字节之后,主机在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
接收应答:在发送完一个字节之后,主机在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)。
I2C数据帧
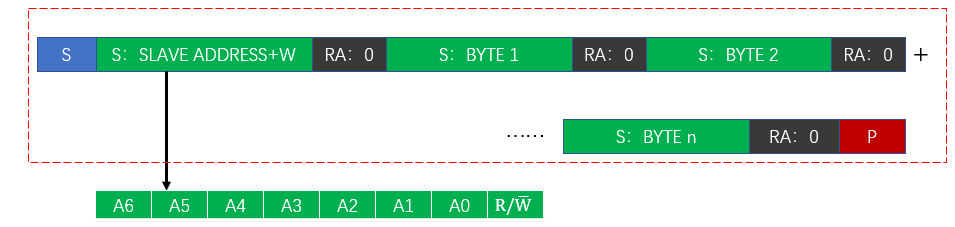
发送一帧数据,解决的问题是向谁发什么:
接收一帧数据,向谁收什么:
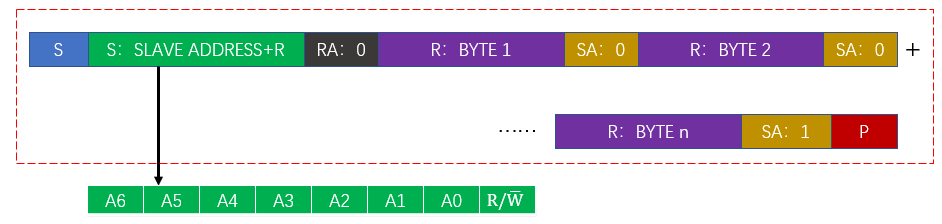
先发送再接收数据帧(复合格式),解决的问题是向谁收指定的什么:
C51的I2C操作封装
I2C.h
#ifndef __I2C_H__
#define __I2C_H__
void I2C_Start(void);
void I2C_Stop(void);
void I2C_SendByte(unsigned char Byte);
unsigned char I2C_ReceiveByte(void);
void I2C_SendAck(unsigned char AckBit);
unsigned char I2C_ReceiveAck(void);
#endif
I2C.c
#include <REGX52.H>
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void I2C_Start(void)
{
I2C_SDA=1;
I2C_SCL=1;
I2C_SDA=0;
I2C_SCL=0;
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void I2C_Stop(void)
{
I2C_SDA=0;
I2C_SCL=1;
I2C_SDA=1;
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void I2C_SendByte(unsigned char Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
I2C_SDA=Byte&(0x80>>i);
I2C_SCL=1;
I2C_SCL=0;
}
}
/**
* @brief I2C接收一个字节
* @param 无
* @retval 接收到的一个字节数据
*/
unsigned char I2C_ReceiveByte(void)
{
unsigned char i,Byte=0x00;
I2C_SDA=1;
for(i=0;i<8;i++)
{
I2C_SCL=1;
if(I2C_SDA){Byte|=(0x80>>i);}
I2C_SCL=0;
}
return Byte;
}
/**
* @brief I2C发送应答
* @param AckBit 应答位,0为应答,1为非应答
* @retval 无
*/
void I2C_SendAck(unsigned char AckBit)
{
I2C_SDA=AckBit;
I2C_SCL=1;
I2C_SCL=0;
}
/**
* @brief I2C接收应答位
* @param 无
* @retval 接收到的应答位,0为应答,1为非应答
*/
unsigned char I2C_ReceiveAck(void)
{
unsigned char AckBit;
I2C_SDA=1;
I2C_SCL=1;
AckBit=I2C_SDA;
I2C_SCL=0;
return AckBit;
}
AT24C02存储器
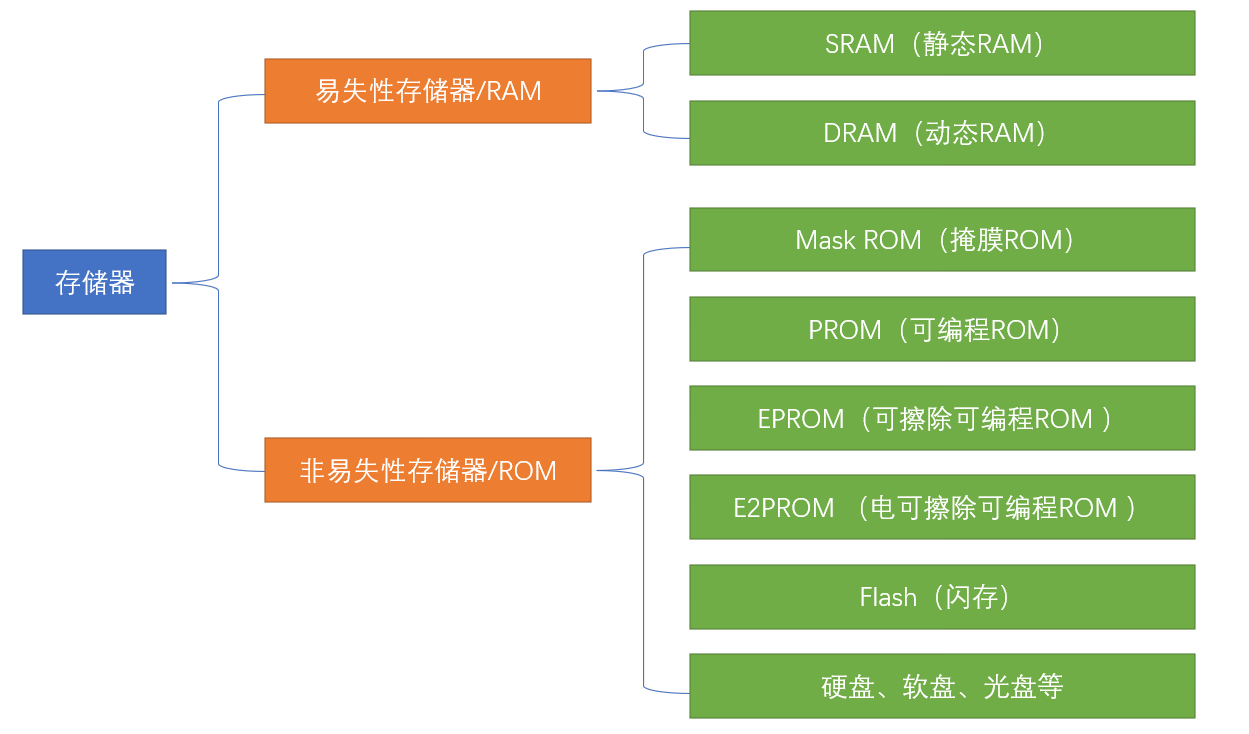
存储器分类
AT24C02简介
AT24C02是一种可以实现掉电不丢失的存储器,可用于保存单片机运行时想要永久保存的数据信息,其存储介质:E2PROM。通讯接口是I2C总线,容量256字节。
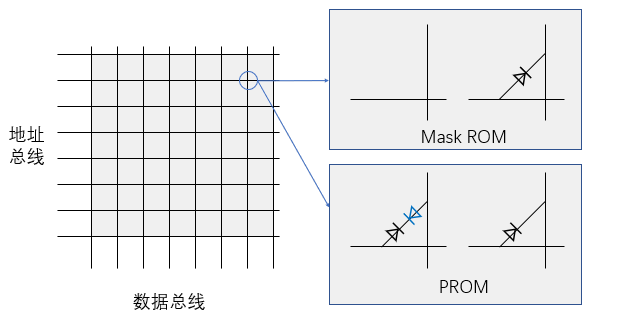
存储器简化模型:
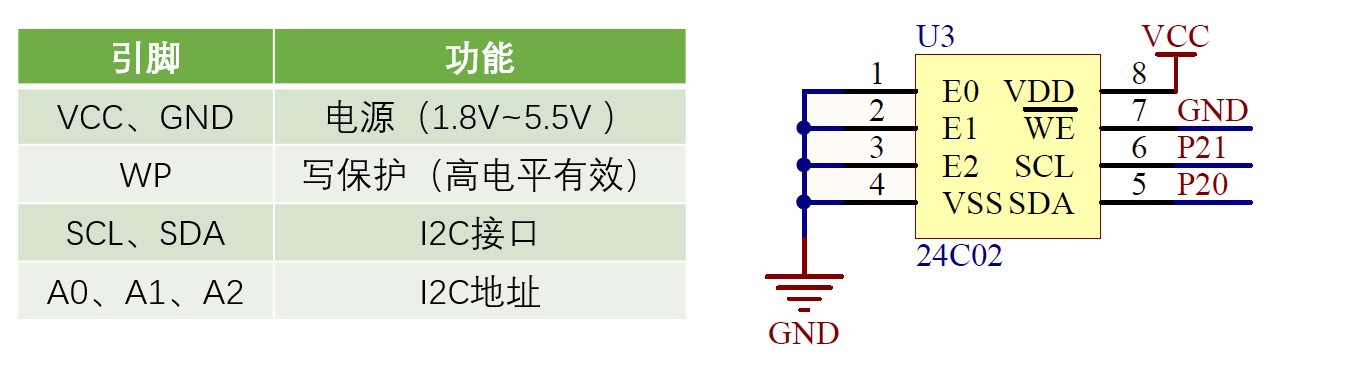
AT24C02引脚及应用电路:
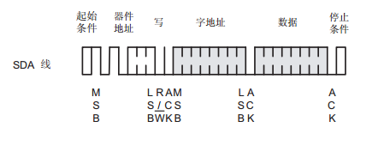
AT24C02数据帧
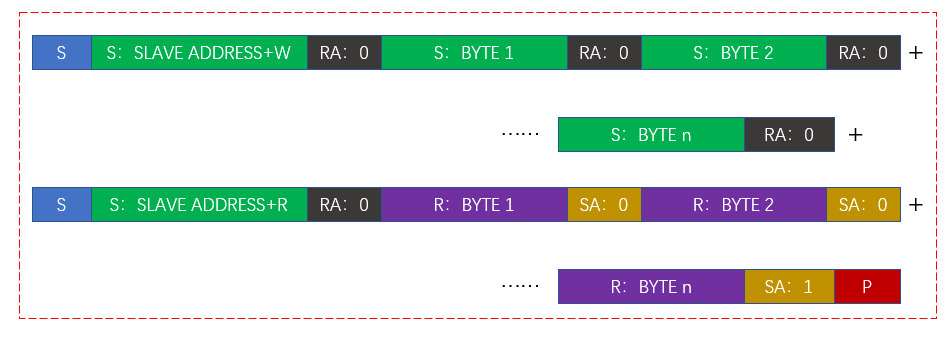
字节写:在WORD ADDRESS处写入数据DATA

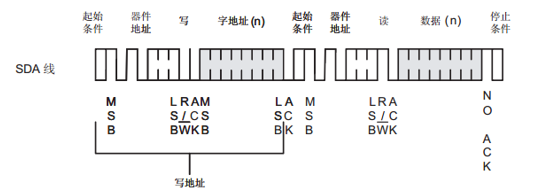
随机读:读出在WORD ADDRESS处的数据DATA

AT24C02的固定地址为1010,可配置地址本开发板上为000。所以SLAVE ADDRESS+W为0xA0,SLAVE ADDRESS+R为0xA1。
字节写:在"字地址"处写入"数据"
随机读:读出在"字地址"处的"数据"
I2C操作AT24C02示例
依托于之前封装的I2C的代码,下面是AT24C02.h
#ifndef __AT24C02_H__
#define __AT24C02_H__
void AT24C02_WriteByte(unsigned char WordAddress,Data);
unsigned char AT24C02_ReadByte(unsigned char WordAddress);
#endif
AT24C02.c
#include <REGX52.H>
#include "I2C.h"
#define AT24C02_ADDRESS 0xA0
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址
* @param Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_SendByte(Data);
I2C_ReceiveAck();
I2C_Stop();
}
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval 读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS|0x01);
I2C_ReceiveAck();
Data=I2C_ReceiveByte();
I2C_SendAck(1);
I2C_Stop();
return Data;
}
main.c
#include <REGX51.H>
#include "Delay.h"
#include "LCD1602.h"
#include "AT24C02.h"
void main(void){
unsigned char retData;
LCD_Init();
LCD_ShowString(1, 1, "Hello I2C");
// 写入
AT24C02_WriteByte(1, 188);
// 写入后等待5毫秒,相当于同步的IO等待
Delay(5);
// 读取
retData = AT24C02_ReadByte(1);
LCD_ShowNum(2, 1, retData, 3);
while(1){
}
}
温度传感器
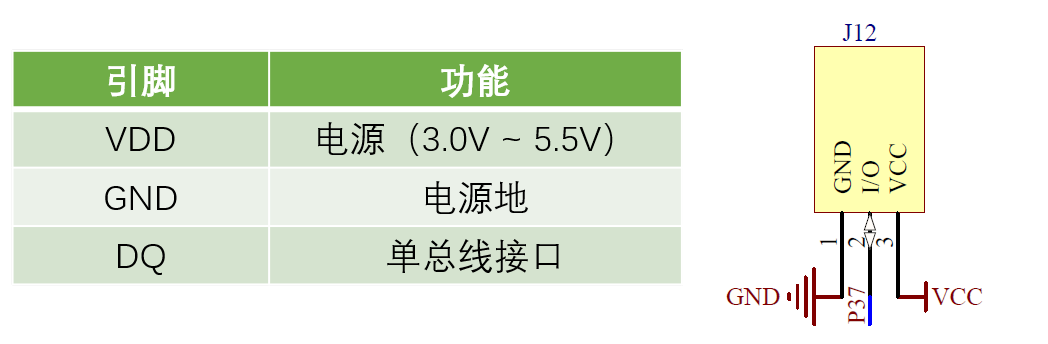
DS18B02
DS18B20是一种常见的数字温度传感器,其控制命令和数据都是以数字信号的方式输入输出,相比较于模拟温度传感器,具有功能强大、硬件简单、易扩展、抗干扰性强等特点。其测温范围是-55°C 到 +125°C,通信方式为1-Wire(单总线),可形成总线结构、内置温度报警功能、可寄生供电。
DS18B02的内部结构框图:
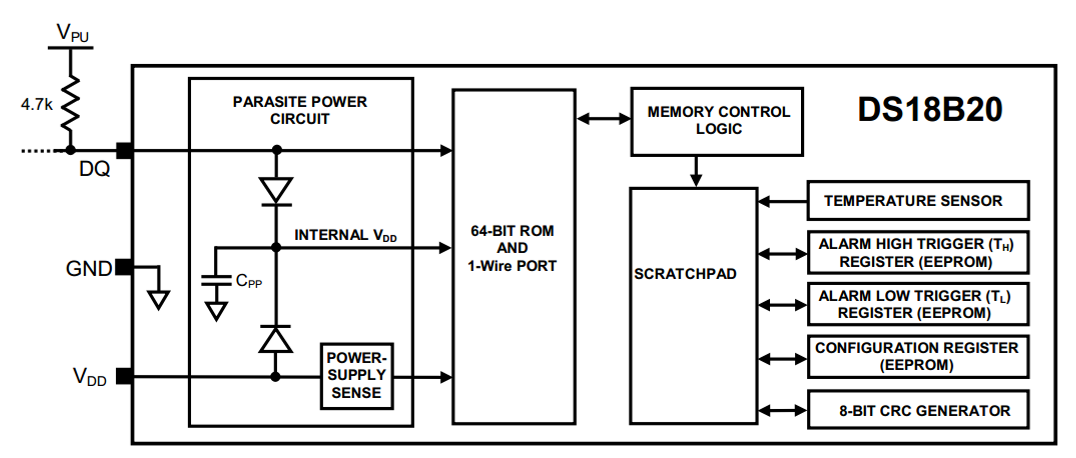
64-BIT ROM:作为器件地址,用于总线通信的寻址
SCRATCHPAD(暂存器):用于总线的数据交互
EEPROM:用于保存温度触发阈值和配置参数
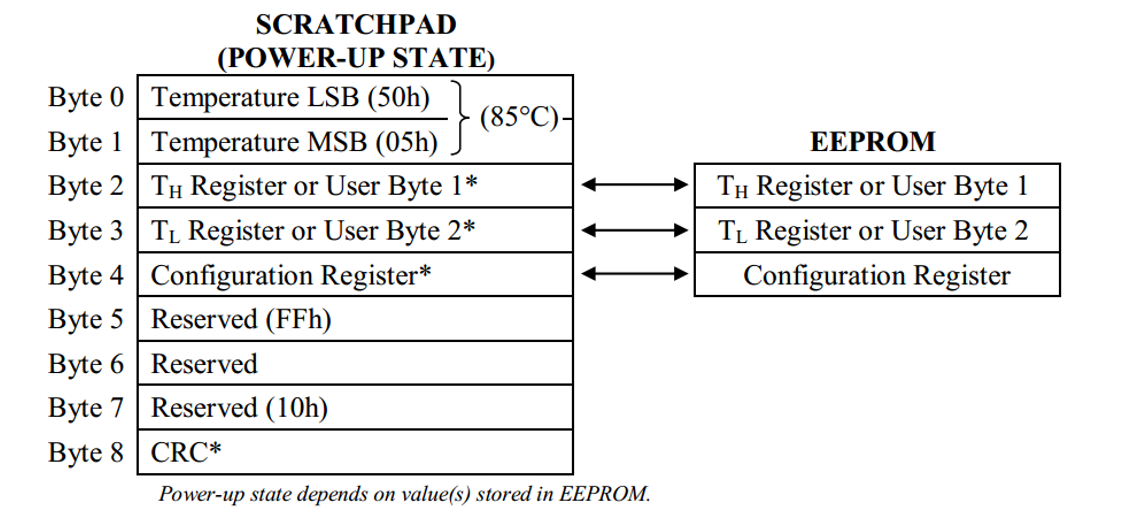
DS18B02的存储器结构如下,如果只是读取温度的话那么只需要前两个字节就好了:
单总线(1-Wire BUS)
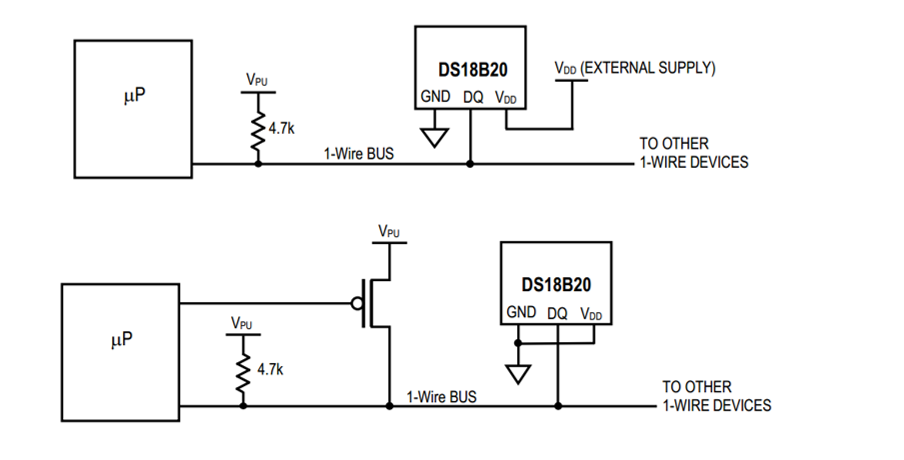
单总线(1-Wire BUS)是由Dallas公司开发的一种通用数据总线,它只有一根通信线:DQ。通信是异步、半双工的方式。单总线只需要一根通信线即可实现数据的双向传输,当采用寄生供电时,还可以省去设备的VDD线路,此时,供电加通信只需要DQ和GND两根线。
单总线线路规范:设备的DQ均要配置成开漏输出模式,DQ添加一个上拉电阻,阻值一般为4.7KΩ左右,若此总线的从机采取寄生供电,则主机还应配一个强上拉输出电路。
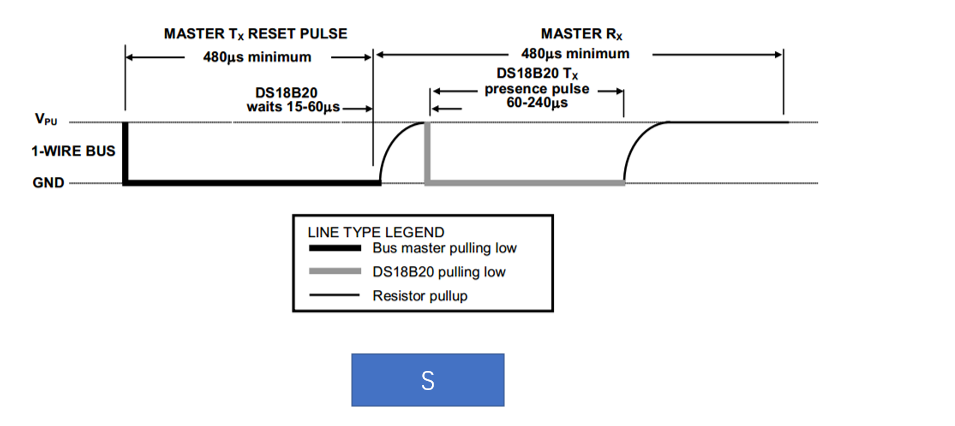
单总线时序结构
初始化:主机将总线拉低至少480us,然后释放总线,等待15~60us后,存在的从机会拉低总线60~240us以响应主机,之后从机将释放总线。
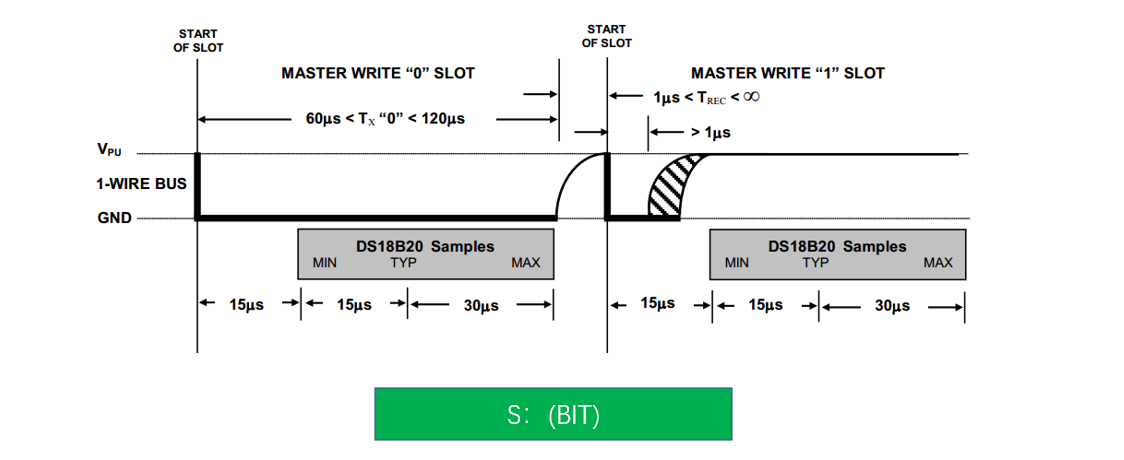
发送一位:主机将总线拉低60~120us,然后释放总线,表示发送0;主机将总线拉低1~15us,然后释放总线,表示发送1。从机将在总线拉低30us后(典型值)读取电平,整个时间片应大于60us
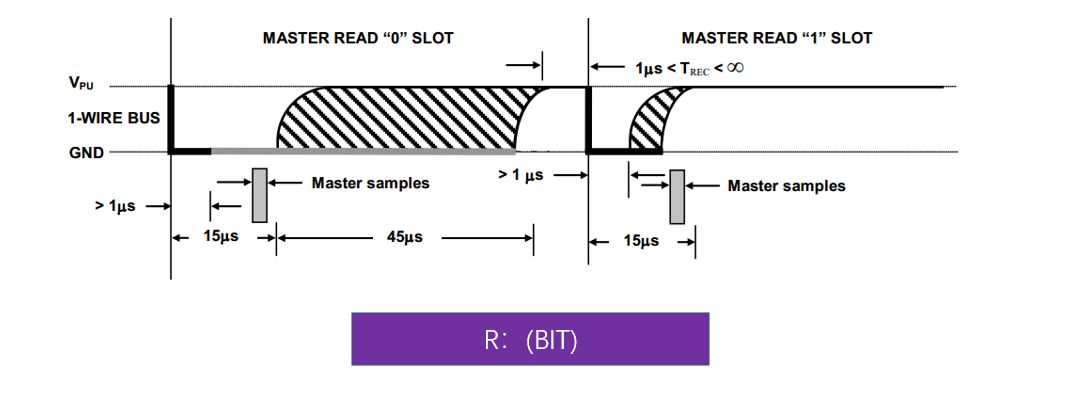
接收一位:主机将总线拉低1~15us,然后释放总线,并在拉低后15us内读取总线电平(尽量贴近15us的末尾),读取为低电平则为接收0,读取为高电平则为接收1 ,整个时间片应大于60us
发送一个字节:连续调用8次发送一位的时序,依次发送一个字节的8位(低位在前)

接收一个字节:连续调用8次接收一位的时序,依次接收一个字节的8位(低位在前)

C51单总线操作封装
OneWire.c
#include <REGX52.H>
//引脚定义
sbit OneWire_DQ=P3^7;
/**
* @brief 单总线初始化
* @param 无
* @retval 从机响应位,0为响应,1为未响应
*/
unsigned char OneWire_Init(void)
{
unsigned char i;
unsigned char AckBit;
OneWire_DQ=1;
OneWire_DQ=0;
i = 247;while (--i); //Delay 500us
OneWire_DQ=1;
i = 32;while (--i); //Delay 70us
AckBit=OneWire_DQ;
i = 247;while (--i); //Delay 500us
return AckBit;
}
/**
* @brief 单总线发送一位
* @param Bit 要发送的位
* @retval 无
*/
void OneWire_SendBit(unsigned char Bit)
{
unsigned char i;
OneWire_DQ=0;
i = 4;while (--i); //Delay 10us
OneWire_DQ=Bit;
i = 24;while (--i); //Delay 50us
OneWire_DQ=1;
}
/**
* @brief 单总线接收一位
* @param 无
* @retval 读取的位
*/
unsigned char OneWire_ReceiveBit(void)
{
unsigned char i;
unsigned char Bit;
OneWire_DQ=0;
i = 2;while (--i); //Delay 5us
OneWire_DQ=1;
i = 2;while (--i); //Delay 5us
Bit=OneWire_DQ;
i = 24;while (--i); //Delay 50us
return Bit;
}
/**
* @brief 单总线发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void OneWire_SendByte(unsigned char Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
OneWire_SendBit(Byte&(0x01<<i));
}
}
/**
* @brief 单总线接收一个字节
* @param 无
* @retval 接收的一个字节
*/
unsigned char OneWire_ReceiveByte(void)
{
unsigned char i;
unsigned char Byte=0x00;
for(i=0;i<8;i++)
{
if(OneWire_ReceiveBit()){Byte|=(0x01<<i);}
}
return Byte;
}
OneWire.h
#ifndef __ONEWIRE_H__
#define __ONEWIRE_H__
unsigned char OneWire_Init(void);
void OneWire_SendBit(unsigned char Bit);
unsigned char OneWire_ReceiveBit(void);
void OneWire_SendByte(unsigned char Byte);
unsigned char OneWire_ReceiveByte(void);
#endif
DS18B20操作流程
初始化:从机复位,主机判断从机是否响应
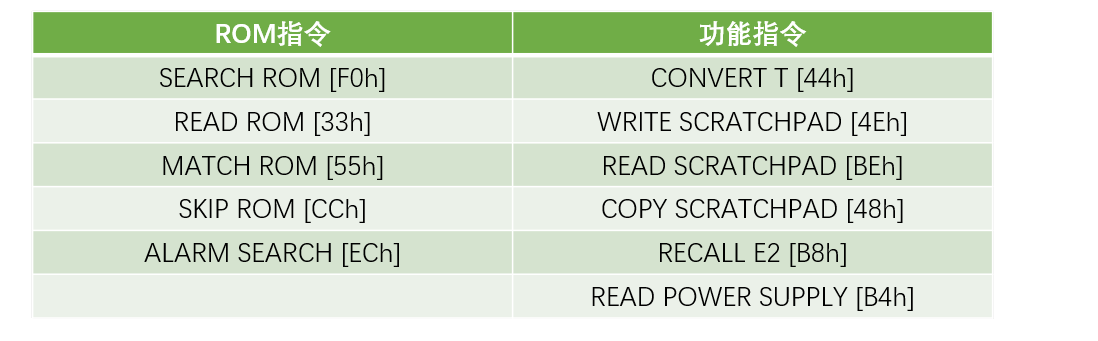
ROM操作:ROM指令+本指令需要的读写操作
功能操作:功能指令+本指令需要的读写操作
DS18B20数据帧
温度变换:初始化→跳过ROM →开始温度变换

温度读取:初始化→跳过ROM →读暂存器→连续的读操作

读取DS18B20示例
代码基于单总线的代码: DS18B20.h
#ifndef __DS18B20_H__
#define __DS18B20_H__
void DS18B20_ConvertT(void);
float DS18B20_ReadT(void);
#endif
DS18B20.c
#include <REGX52.H>
#include "OneWire.h"
//DS18B20指令
#define DS18B20_SKIP_ROM 0xCC
#define DS18B20_CONVERT_T 0x44
#define DS18B20_READ_SCRATCHPAD 0xBE
/**
* @brief DS18B20开始温度变换
* @param 无
* @retval 无
*/
void DS18B20_ConvertT(void)
{
OneWire_Init();
OneWire_SendByte(DS18B20_SKIP_ROM);
OneWire_SendByte(DS18B20_CONVERT_T);
}
/**
* @brief DS18B20读取温度
* @param 无
* @retval 温度数值
*/
float DS18B20_ReadT(void)
{
unsigned char TLSB,TMSB;
int Temp;
float T;
OneWire_Init();
OneWire_SendByte(DS18B20_SKIP_ROM);
OneWire_SendByte(DS18B20_READ_SCRATCHPAD);
TLSB=OneWire_ReceiveByte();
TMSB=OneWire_ReceiveByte();
Temp=(TMSB<<8)|TLSB;
T=Temp/16.0;
return T;
}
LCD1602液晶屏
LCD1602简介
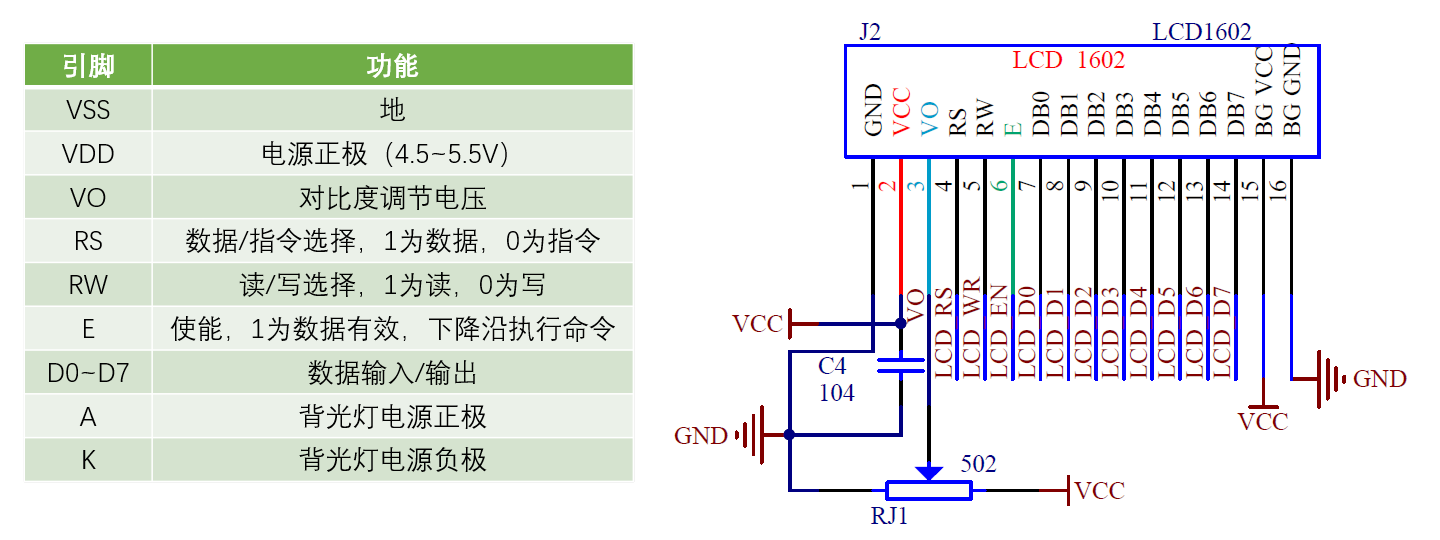
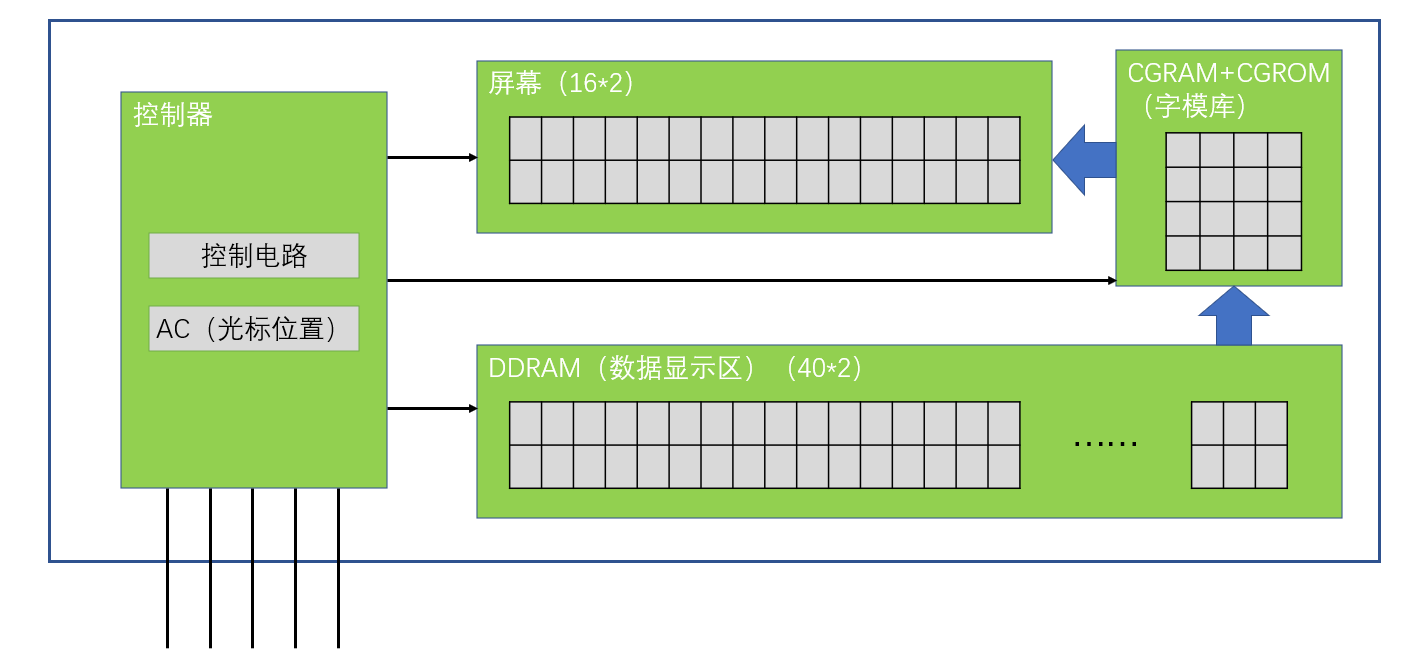
LCD1602(Liquid Crystal Display)液晶显示屏是一种字符型液晶显示模块,可以显示ASCII码的标准字符和其它的一些内置特殊字符,还可以有8个自定义字符,其显示容量为16×2个字符,每个字符为5*7点阵。引脚及应用电路如下图所示:
LCD1602内部结构框图:
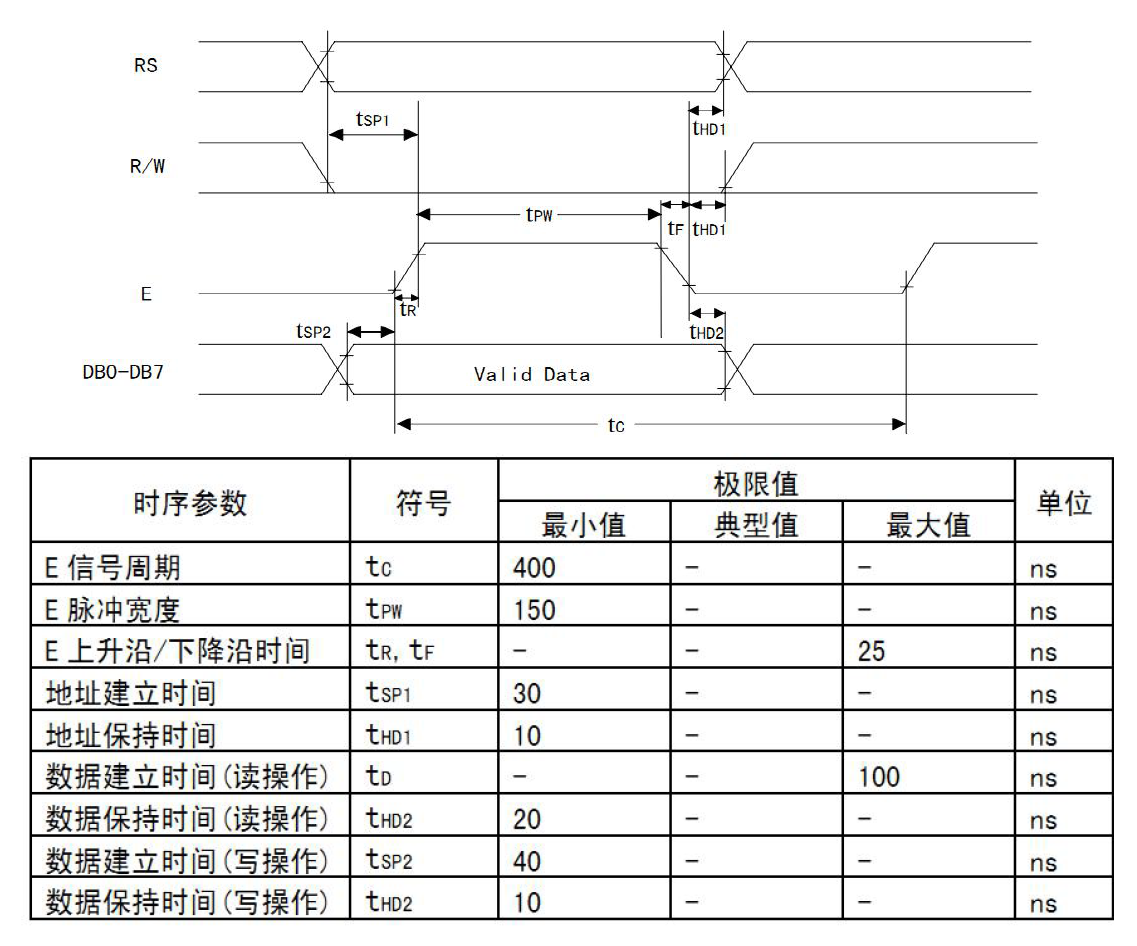
LCD1602显示模块时序与参数图:
LCD1602操作流程
初始化:
发送指令0x38 //八位数据接口,两行显示,5*7点阵
发送指令0x0C //显示开,光标关,闪烁关
发送指令0x06 //数据读写操作后,光标自动加一,画面不动
发送指令0x01 //清屏
显示字符:
发送指令0x80|AC //设置光标位置
发送数据 //发送要显示的字符数据
发送数据 //发送要显示的字符数据
……
LCD1602操作封装
LCD1602.h
#ifndef __LCD1602_H__
#define __LCD1602_H__
//用户调用函数:
void LCD_Init();
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char);
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String);
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length);
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
#endif
LCD1602.c
#include <REGX52.H>
//引脚配置:
sbit LCD_RS=P2^6;
sbit LCD_RW=P2^5;
sbit LCD_EN=P2^7;
#define LCD_DataPort P0
//函数定义:
/**
* @brief LCD1602延时函数,12MHz调用可延时1ms
* @param 无
* @retval 无
*/
void LCD_Delay()
{
unsigned char i, j;
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
/**
* @brief LCD1602写命令
* @param Command 要写入的命令
* @retval 无
*/
void LCD_WriteCommand(unsigned char Command)
{
LCD_RS=0;
LCD_RW=0;
LCD_DataPort=Command;
LCD_EN=1;
LCD_Delay();
LCD_EN=0;
LCD_Delay();
}
/**
* @brief LCD1602写数据
* @param Data 要写入的数据
* @retval 无
*/
void LCD_WriteData(unsigned char Data)
{
LCD_RS=1;
LCD_RW=0;
LCD_DataPort=Data;
LCD_EN=1;
LCD_Delay();
LCD_EN=0;
LCD_Delay();
}
/**
* @brief LCD1602设置光标位置
* @param Line 行位置,范围:1~2
* @param Column 列位置,范围:1~16
* @retval 无
*/
void LCD_SetCursor(unsigned char Line,unsigned char Column)
{
if(Line==1)
{
LCD_WriteCommand(0x80|(Column-1));
}
else if(Line==2)
{
LCD_WriteCommand(0x80|(Column-1+0x40));
}
}
/**
* @brief LCD1602初始化函数
* @param 无
* @retval 无
*/
void LCD_Init()
{
LCD_WriteCommand(0x38);//八位数据接口,两行显示,5*7点阵
LCD_WriteCommand(0x0c);//显示开,光标关,闪烁关
LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动
LCD_WriteCommand(0x01);//光标复位,清屏
}
/**
* @brief 在LCD1602指定位置上显示一个字符
* @param Line 行位置,范围:1~2
* @param Column 列位置,范围:1~16
* @param Char 要显示的字符
* @retval 无
*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char)
{
LCD_SetCursor(Line,Column);
LCD_WriteData(Char);
}
/**
* @brief 在LCD1602指定位置开始显示所给字符串
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串
* @retval 无
*/
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=0;String[i]!='\0';i++)
{
LCD_WriteData(String[i]);
}
}
/**
* @brief 返回值=X的Y次方
*/
int LCD_Pow(int X,int Y)
{
unsigned char i;
int Result=1;
for(i=0;i<Y;i++)
{
Result*=X;
}
return Result;
}
/**
* @brief 在LCD1602指定位置开始显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~65535
* @param Length 要显示数字的长度,范围:1~5
* @retval 无
*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
LCD_WriteData(Number/LCD_Pow(10,i-1)%10+'0');
}
}
/**
* @brief 在LCD1602指定位置开始以有符号十进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-32768~32767
* @param Length 要显示数字的长度,范围:1~5
* @retval 无
*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length)
{
unsigned char i;
unsigned int Number1;
LCD_SetCursor(Line,Column);
if(Number>=0)
{
LCD_WriteData('+');
Number1=Number;
}
else
{
LCD_WriteData('-');
Number1=-Number;
}
for(i=Length;i>0;i--)
{
LCD_WriteData(Number1/LCD_Pow(10,i-1)%10+'0');
}
}
/**
* @brief 在LCD1602指定位置开始以十六进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFF
* @param Length 要显示数字的长度,范围:1~4
* @retval 无
*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i,SingleNumber;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
SingleNumber=Number/LCD_Pow(16,i-1)%16;
if(SingleNumber<10)
{
LCD_WriteData(SingleNumber+'0');
}
else
{
LCD_WriteData(SingleNumber-10+'A');
}
}
}
/**
* @brief 在LCD1602指定位置开始以二进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
LCD_WriteData(Number/LCD_Pow(2,i-1)%2+'0');
}
}
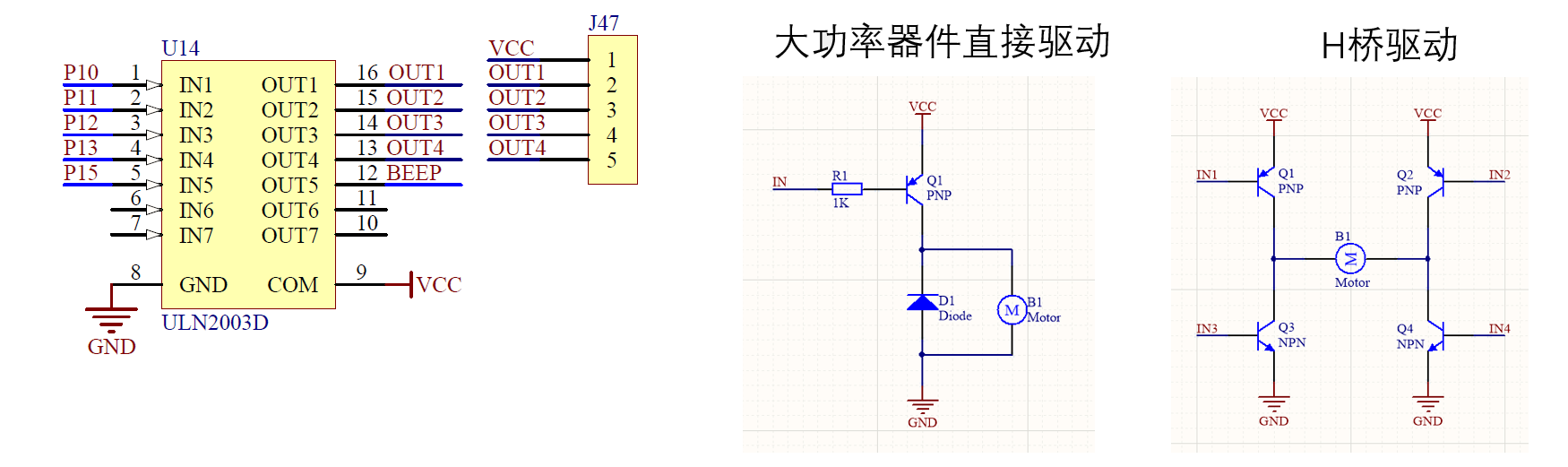
直流电机驱动
直流电机是一种将电能转换为机械能的装置。一般的直流电机有两个电极,当电极正接时,电机正转,当电极反接时,电机反转。直流电机主要由永磁体(定子)、线圈(转子)和换向器组成。除直流电机外,常见的电机还有步进电机、舵机、无刷电机、空心杯电机等。

电机驱动模块的驱动电路:
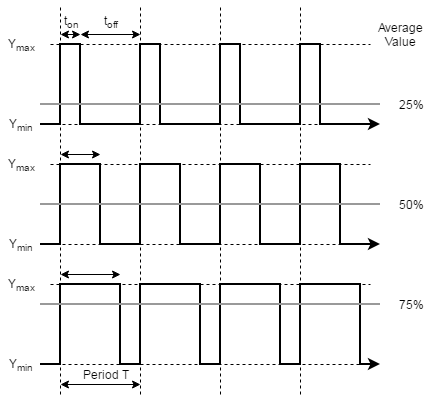
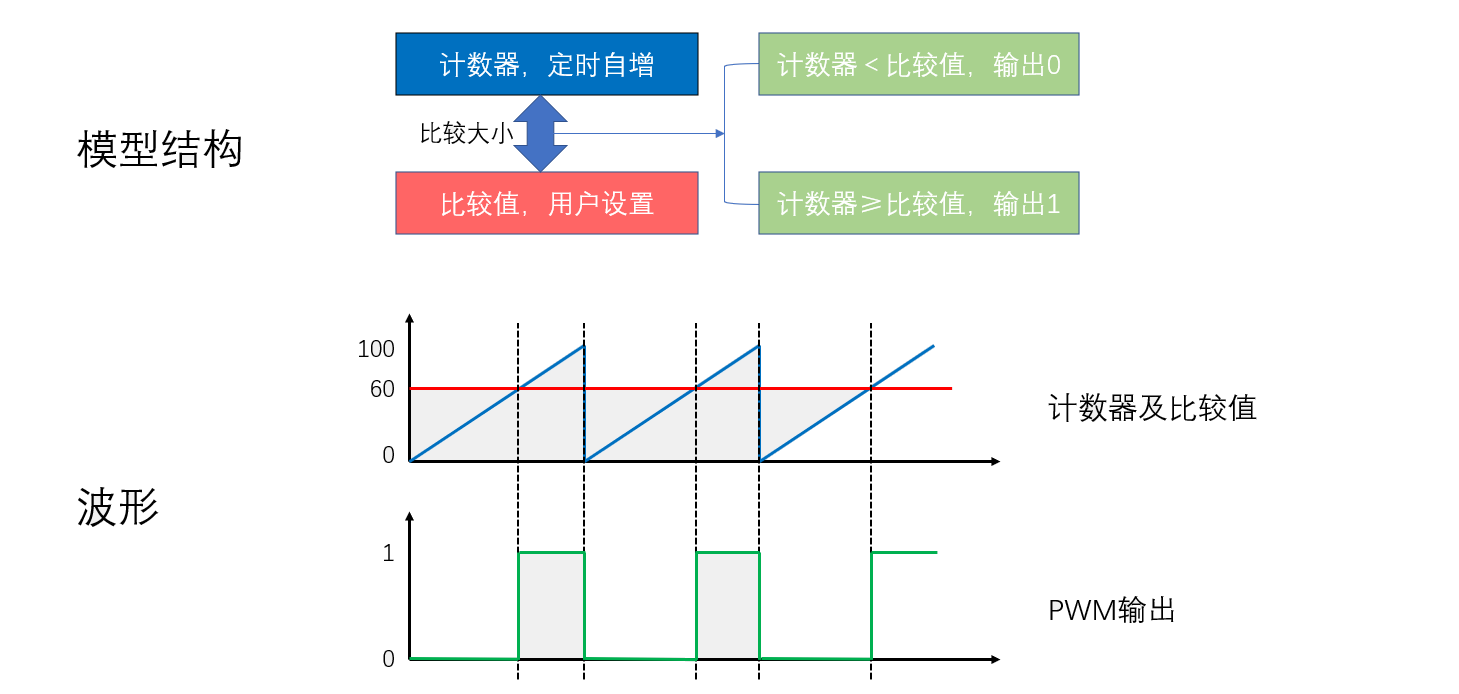
PWM 脉冲调制
PWM(Pulse Width Modulation)即脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速、开关电源等领域。
这种调制技术可用于对信息进行编码以进行传输。它也常用于控制向电气设备(尤其是电机等惯性负载)提供的电源。通过高速打开和关闭电源和负载之间的开关,可以控制提供给负载的电压(和电流)的平均值。与关闭时间相比,开启时间越长,提供给负载的电压(和电流)就越高。
占空比是指“开启”时间与固定间隔或“周期”的比率。低占空比对应于低功率,因为大部分时间都处于关闭状态。占空比通常以百分比表示,100% 表示开关完全打开。根据 PWM 波形的占空比,有一个如图所示的平均值。t_on小,平均值低,如果大,平均值高。通过控制占空比就可以控制这个平均值。在使用 PWM 时,我们通常关心的是这个平均值。
产生PWM方法
下面来实现一个LED呼吸灯
main.c
#include <REGX52.H>
sbit LED=P2^0;
void Delay(unsigned int t)
{
while(t--);
}
void main()
{
unsigned char Time,i;
while(1)
{
for(Time=0;Time<100;Time++) // 改变亮灭时间,由暗到亮
{
for(i=0;i<20;i++) // 计次延时
{
LED=0; // LED亮
Delay(Time); // 延时Time
LED=1; // LED灭
Delay(100-Time); // 延时100-Time
}
}
for(Time=100;Time>0;Time--) // 改变亮灭时间,由亮到暗
{
for(i=0;i<20;i++) // 计次延时
{
LED=0; // LED亮
Delay(Time); // 延时Time
LED=1; // LED灭
Delay(100-Time); // 延时100-Time
}
}
}
}
下面通过比较值的方法实现电机调速
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Timer0.h"
sbit Motor=P1^0;
unsigned char Counter,Compare; // 计数值和比较值,用于输出PWM
unsigned char KeyNum,Speed;
void main()
{
Timer0_Init();
while(1)
{
KeyNum=Key();
if(KeyNum==1)
{
Speed++;
Speed%=4;
if(Speed==0){Compare=0;} // 设置比较值,改变PWM占空比
if(Speed==1){Compare=50;}
if(Speed==2){Compare=75;}
if(Speed==3){Compare=100;}
}
Nixie(1,Speed);
}
}
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; // 设置定时初值
TH0 = 0xFF; // 设置定时初值
Counter++;
Counter%=100; // 计数值变化范围限制在0~99
if(Counter<Compare) // 计数值小于比较值
{
Motor=1; // 输出1
}
else // 计数值大于比较值
{
Motor=0; // 输出0
}
}
AD/DA
AD(Analog to Digital):模拟-数字转换,将模拟信号转换为计算机可操作的数字信号;
DA(Digital to Analog):数字-模拟转换,将计算机输出的数字信号转换为模拟信号;
AD/DA转换打开了计算机与模拟信号的大门,极大的提高了计算机系统的应用范围,也为模拟信号数字化处理提供了可能。
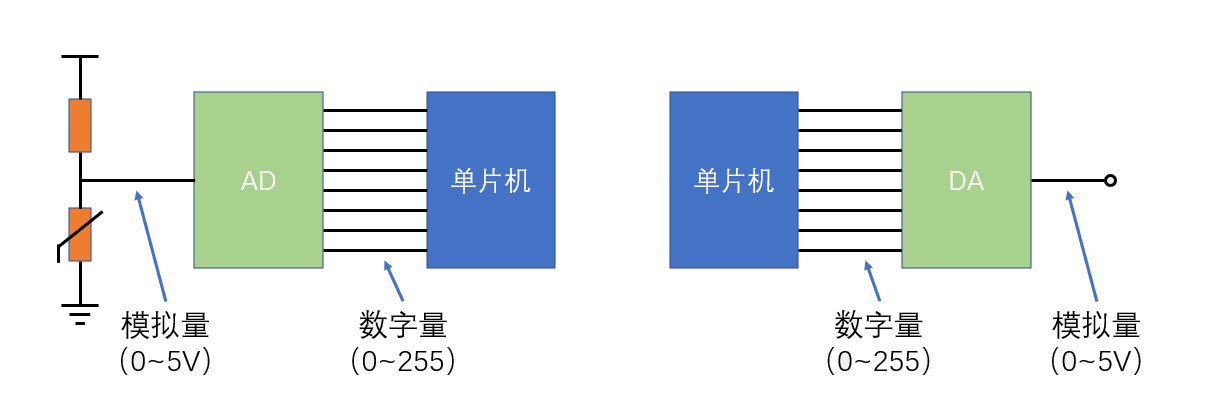
AD转换通常有多个输入通道,用多路选择开关连接至AD转换器,以实现AD多路复用的目的,提高硬件利用率。
AD/DA与单片机数据传送可使用并口(速度快、原理简单),也可使用串口(接线少、使用方便)。
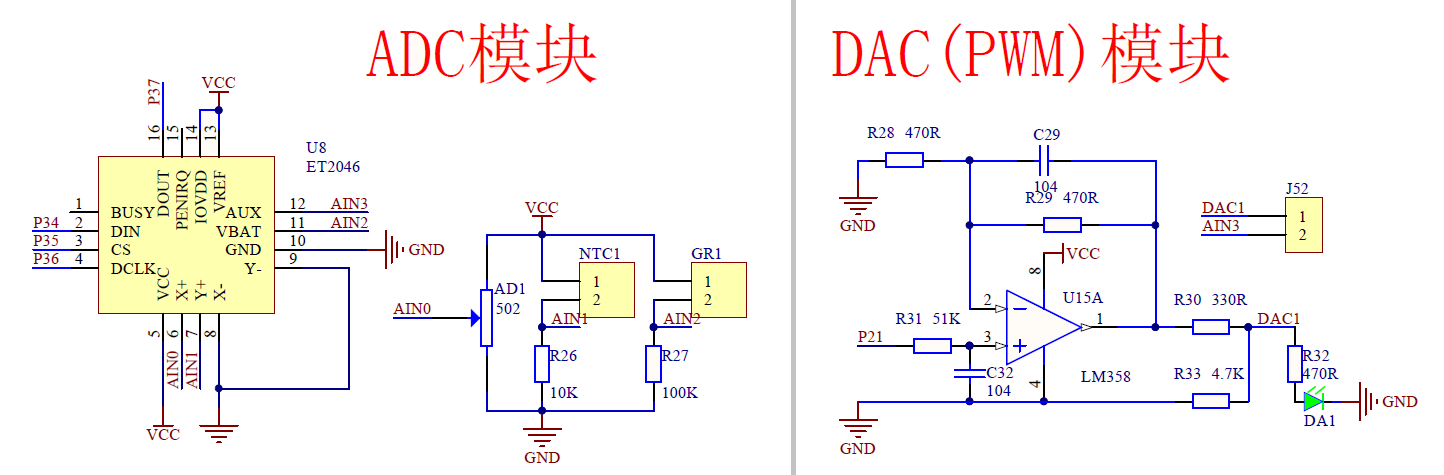
可将AD/DA模块直接集成在单片机内,这样直接写入/读出寄存器就可进行AD/DA转换,单片机的IO口可直接复用为AD/DA的通道。下面是硬件电路图:
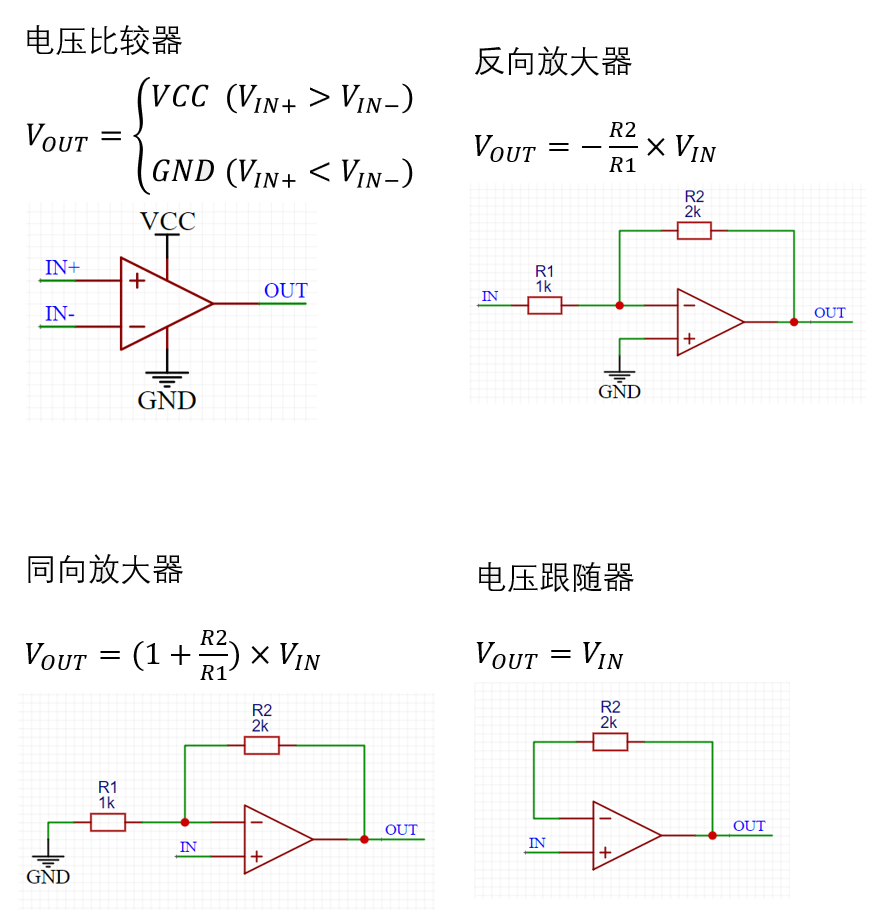
运算放大器
运算放大器是具有很高放大倍数的放大电路单元。内部集成了差分放大器、电压放大器、功率放大器三级放大电路,是一个性能完备、功能强大的通用放大电路单元,由于其应用十分广泛,现已作为基本的电路元件出现在电路图中。运算放大器可构成的电路有:电压比较器、反相放大器、同相放大器、电压跟随器、加法器、积分器、微分器等,运算放大器电路的分析方法:虚短、虚断(负反馈条件下)。
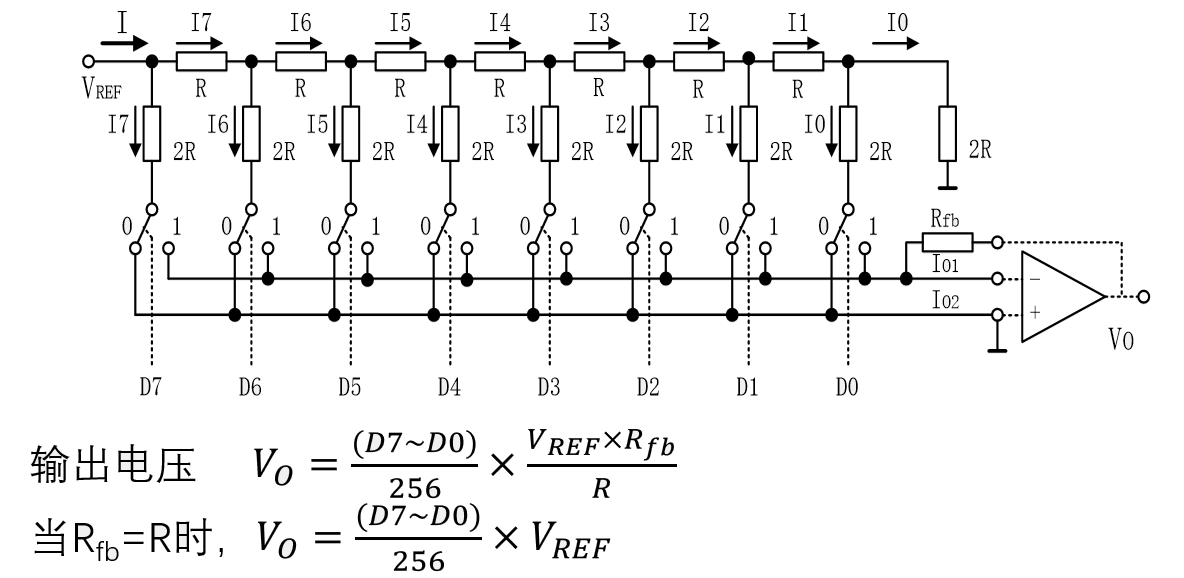
下面是用T型电阻网络DA转换器展示的AD演示图:
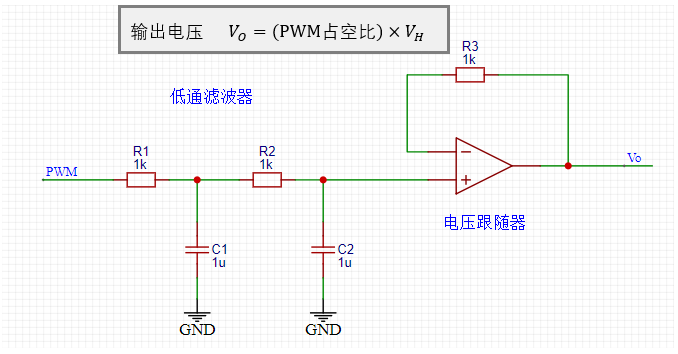
PWM型DA转换器:
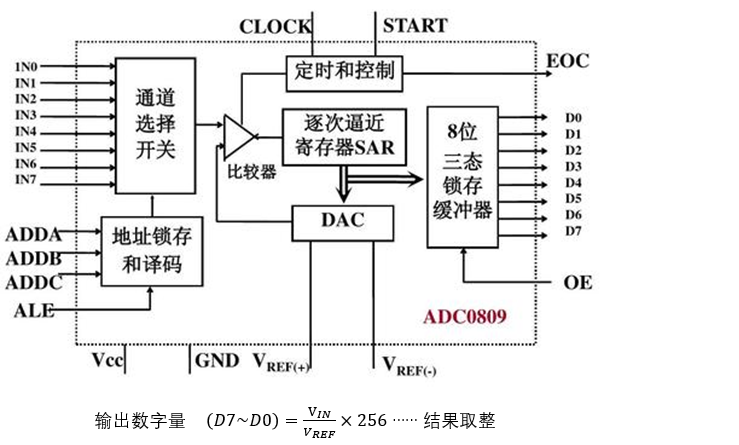
逐次逼近型AD转换器:
AD/DA的性能指标
分辨率:指AD/DA数字量的精细程度,通常用位数表示。例如,对于5V电源系统来说,8位的AD可将5V等分为256份,即数字量变化最小一个单位时,模拟量变化5V/256=0.01953125V,所以,8位AD的电压分辨率为0.01953125V,AD/DA的位数越高,分辨率就越高。
转换速度:表示AD/DA的最大采样/建立频率,通常用转换频率或者转换时间来表示,对于采样/输出高速信号,应注意AD/DA的转换速度。
红外遥控
红外遥控简介
红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出。其通信方式为单工,异步。红外LED波长为940nm,通信协议标准为NEC。
由于红外线遥控不具有像无线电遥控那样穿过障碍物去控制被控对象的能力,所以在设计红外线遥控器时,不必要像无线电遥控器那样,每套(发射器和接收器)要有不同的遥控频率或编码否则就会隔墙控制或干扰邻居的家用电器),所以同类产品的红外线遥控器,可以有相同的遥控频率或编码,而不会出现遥控信号“串门”的情况。这对于大批量生产以及在家用电器上普及红外线遥控提供了极大的方便。由于红外线为不可见光,因此对环境影响很小,再由红外光波动波长远小于无线电波的波长,所以红外线遥控不会影响其他家用电器,也不会影响临近的无线电设备。红外遥控通信系统一般由红外发射装置和红外接收设备两大部分组成。
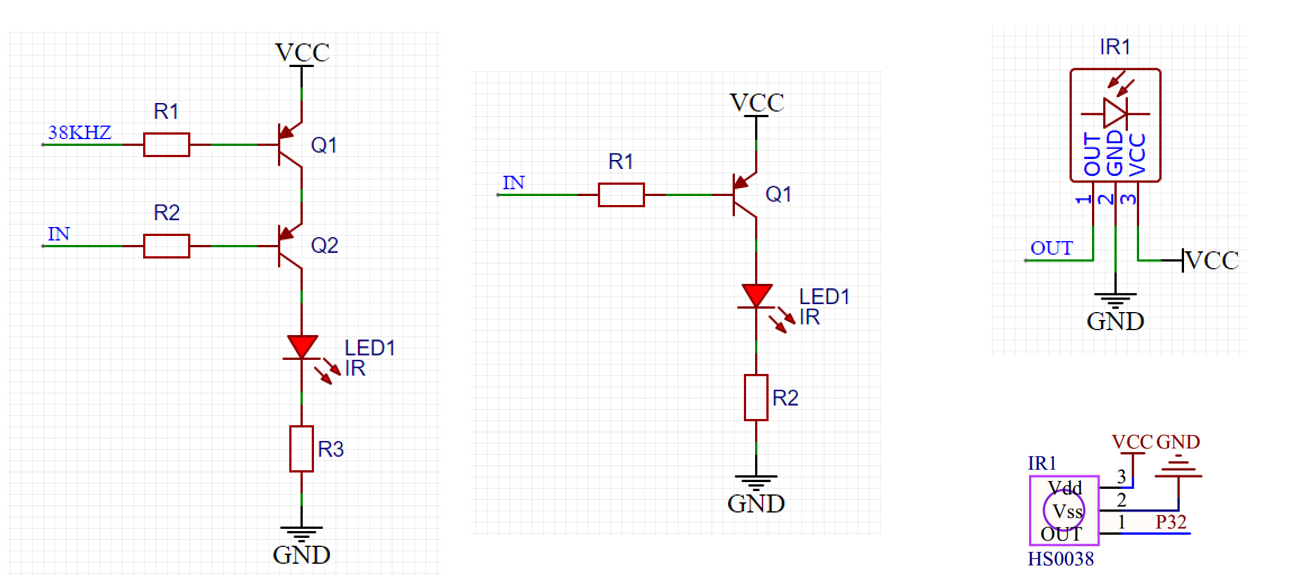
基本发送与接收:
空闲状态:红外LED不亮,接收头输出高电平
发送低电平:红外LED以38KHz频率闪烁发光,接收头输出低电平
发送高电平:红外LED不亮,接收头输出高电平
NEC编码(12MHz晶振),NEC遥控指令的数据格式为:引导码、地址码、地址反码、控制码、控制反码。引导码由一个9ms的低电平和一个 4.5ms的高电平组成,地址码、地址反码、控制码、控制反码均是8位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性(可用于校验)。数据格式如下:
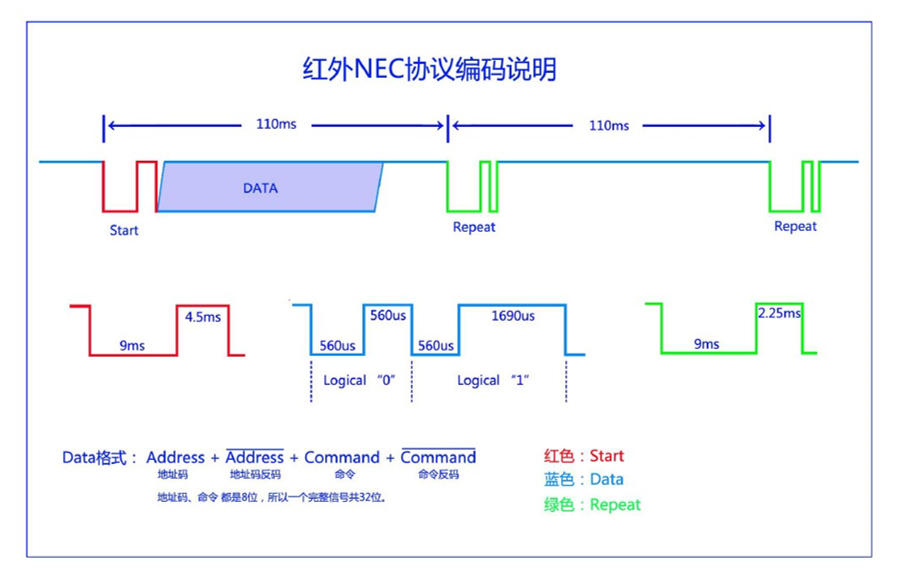
NEC码还规定了连发码(由9ms 低电平+2.5m高电平+0.56ms 低电平+97.94ms高电平组成),如果在一帧数据发送完毕之后,红外遥控器按键仍然没有放开,则发射连发码,可以通过统计连发码的次数来标记按键按下的长短或次数。至于如何解码呢?我们可以使用状态机来解决这个问题。
外部中断
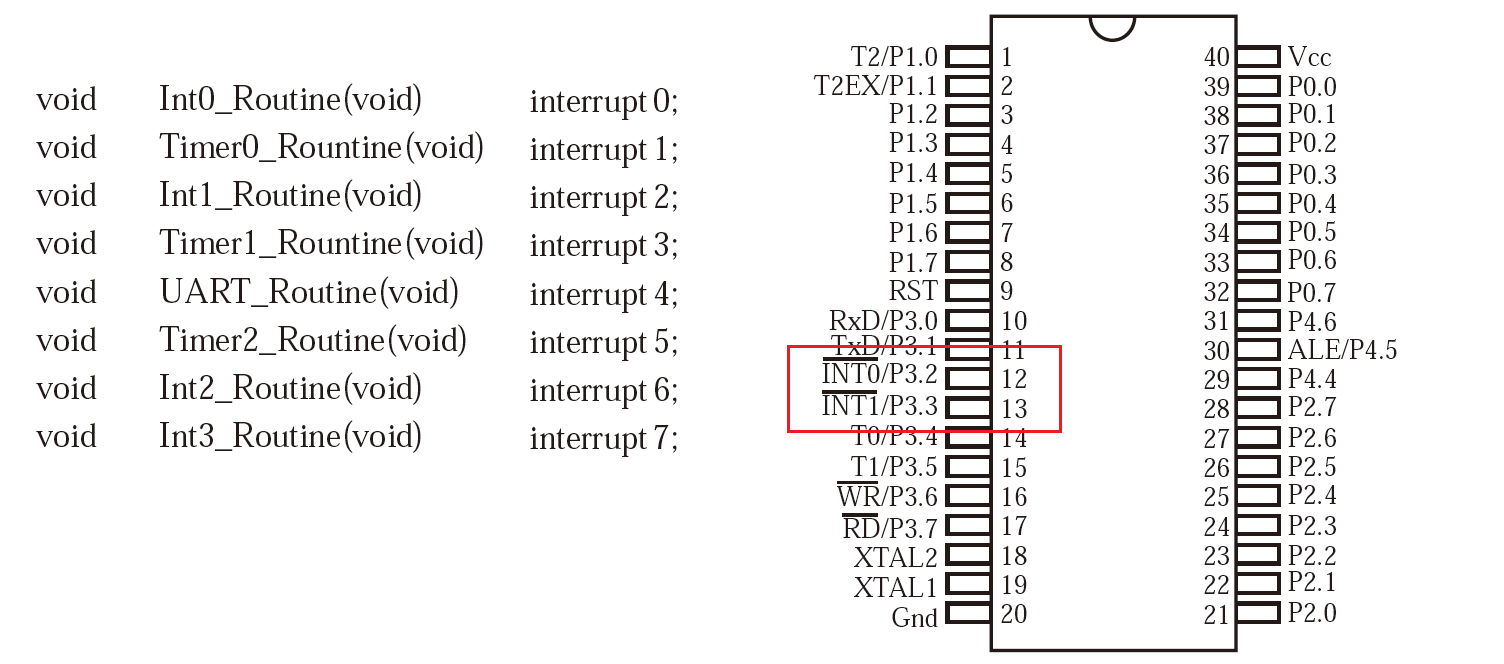
STC89C52有4个外部中断,STC89C52的外部中断有两种触发方式:下降沿触发 和 低电平触发。下降沿触发即发生电平下降的时候就会触发,也就是说如果一个按钮开关在理想情况下,按下这个按钮就会产生一次下降沿,即使按下不松开,也只会产生一次中断。如果是低电平触发,只要按下不松动开,就会一直触发,因为一直处于低电平的状态。下面是STC89C51的外部中断管脚与中断号:
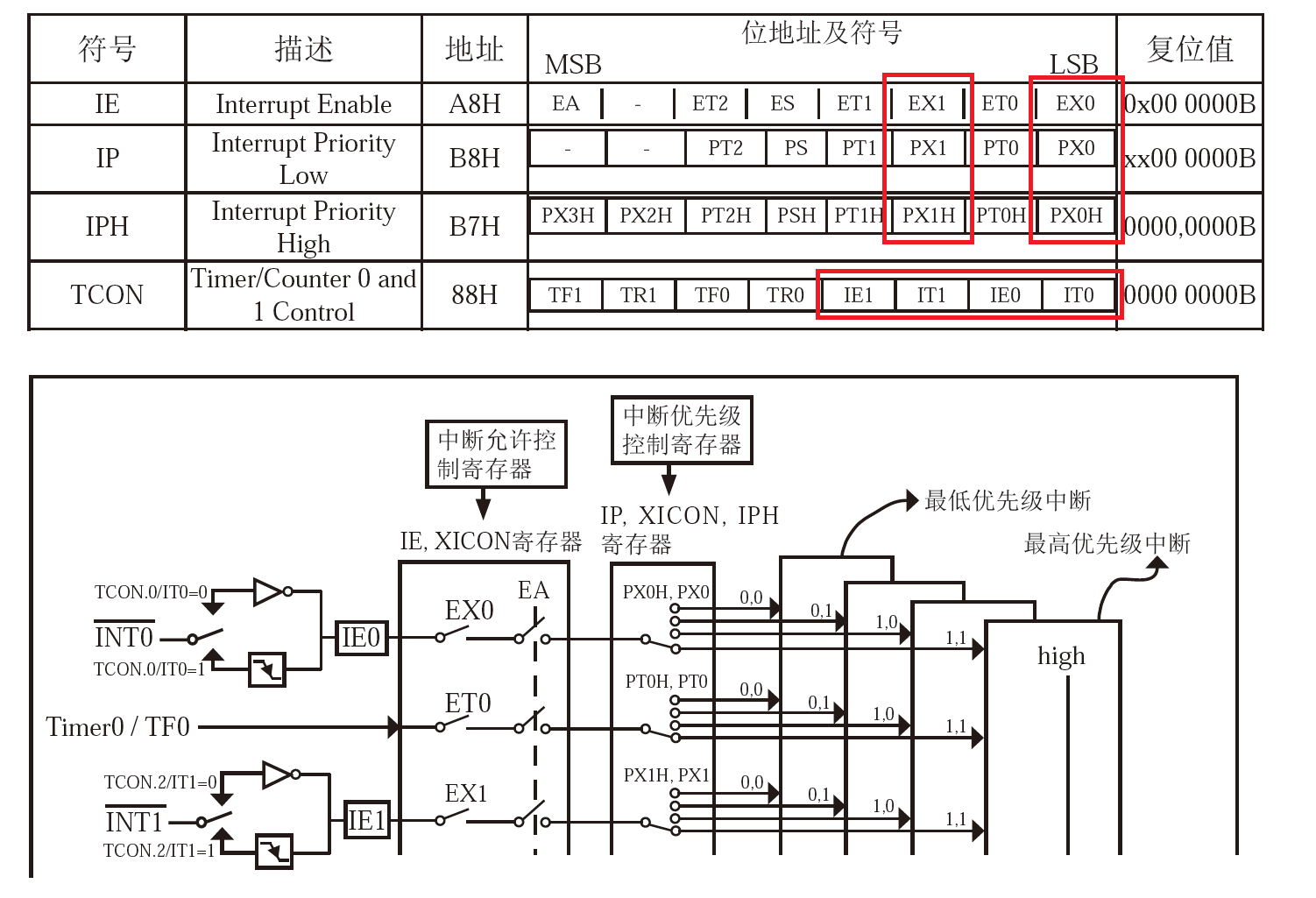
外部中断寄存器:
Int0.h
#ifndef __INT0_H__
#define __INT0_H__
void Int0_Init(void);
#endif
Int0.c
#include <REGX52.H>
/**
* @brief 外部中断0初始化
* @param 无
* @retval 无
*/
void Int0_Init(void)
{
IT0=1;
IE0=0;
EX0=1;
EA=1;
PX0=1;
}
/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{
}
*/
红外遥控Demo
IR.h
#ifndef __IR_H__
#define __IR_H__
#define IR_POWER 0x45
#define IR_MODE 0x46
#define IR_MUTE 0x47
#define IR_START_STOP 0x44
#define IR_PREVIOUS 0x40
#define IR_NEXT 0x43
#define IR_EQ 0x07
#define IR_VOL_MINUS 0x15
#define IR_VOL_ADD 0x09
#define IR_0 0x16
#define IR_RPT 0x19
#define IR_USD 0x0D
#define IR_1 0x0C
#define IR_2 0x18
#define IR_3 0x5E
#define IR_4 0x08
#define IR_5 0x1C
#define IR_6 0x5A
#define IR_7 0x42
#define IR_8 0x52
#define IR_9 0x4A
void IR_Init(void);
unsigned char IR_GetDataFlag(void);
unsigned char IR_GetRepeatFlag(void);
unsigned char IR_GetAddress(void);
unsigned char IR_GetCommand(void);
#endif
IR.c
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"
unsigned int IR_Time;
unsigned char IR_State;
unsigned char IR_Data[4];
unsigned char IR_pData;
unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;
/**
* @brief 红外遥控初始化
* @param 无
* @retval 无
*/
void IR_Init(void)
{
Timer0_Init();
Int0_Init();
}
/**
* @brief 红外遥控获取收到数据帧标志位
* @param 无
* @retval 是否收到数据帧,1为收到,0为未收到
*/
unsigned char IR_GetDataFlag(void)
{
if(IR_DataFlag)
{
IR_DataFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到连发帧标志位
* @param 无
* @retval 是否收到连发帧,1为收到,0为未收到
*/
unsigned char IR_GetRepeatFlag(void)
{
if(IR_RepeatFlag)
{
IR_RepeatFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到的地址数据
* @param 无
* @retval 收到的地址数据
*/
unsigned char IR_GetAddress(void)
{
return IR_Address;
}
/**
* @brief 红外遥控获取收到的命令数据
* @param 无
* @retval 收到的命令数据
*/
unsigned char IR_GetCommand(void)
{
return IR_Command;
}
//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{
if(IR_State==0) //状态0,空闲状态
{
Timer0_SetCounter(0); //定时计数器清0
Timer0_Run(1); //定时器启动
IR_State=1; //置状态为1
}
else if(IR_State==1) //状态1,等待Start信号或Repeat信号
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)
if(IR_Time>12442-500 && IR_Time<12442+500)
{
IR_State=2; //置状态为2
}
//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)
else if(IR_Time>10368-500 && IR_Time<10368+500)
{
IR_RepeatFlag=1; //置收到连发帧标志位为1
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
else //接收出错
{
IR_State=1; //置状态为1
}
}
else if(IR_State==2) //状态2,接收数据
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)
if(IR_Time>1032-500 && IR_Time<1032+500)
{
IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0
IR_pData++; //数据位置指针自增
}
//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)
else if(IR_Time>2074-500 && IR_Time<2074+500)
{
IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1
IR_pData++; //数据位置指针自增
}
else //接收出错
{
IR_pData=0; //数据位置指针清0
IR_State=1; //置状态为1
}
if(IR_pData>=32) //如果接收到了32位数据
{
IR_pData=0; //数据位置指针清0
if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证
{
IR_Address=IR_Data[0]; //转存数据
IR_Command=IR_Data[2];
IR_DataFlag=1; //置收到连发帧标志位为1
}
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
}
}
定时器 Timer0.h 与 Timer0.c
// ------------------------------------------
#ifndef __TIMER0_H__
#define __TIMER0_H__
void Timer0_Init(void);
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter(void);
void Timer0_Run(unsigned char Flag);
#endif
// ------------------------------------------
#include <REGX52.H>
/**
* @brief 定时器0初始化
* @param 无
* @retval 无
*/
void Timer0_Init(void)
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0; //设置定时初值
TH0 = 0; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 0; //定时器0不计时
}
/**
* @brief 定时器0设置计数器值
* @param Value,要设置的计数器值,范围:0~65535
* @retval 无
*/
void Timer0_SetCounter(unsigned int Value)
{
TH0=Value/256;
TL0=Value%256;
}
/**
* @brief 定时器0获取计数器值
* @param 无
* @retval 计数器值,范围:0~65535
*/
unsigned int Timer0_GetCounter(void)
{
return (TH0<<8)|TL0;
}
/**
* @brief 定时器0启动停止控制
* @param Flag 启动停止标志,1为启动,0为停止
* @retval 无
*/
void Timer0_Run(unsigned char Flag)
{
TR0=Flag;
}
main.c
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"
unsigned char Num;
unsigned char Address;
unsigned char Command;
void main()
{
LCD_Init();
LCD_ShowString(1,1,"ADDR CMD NUM");
LCD_ShowString(2,1,"00 00 000");
IR_Init();
while(1)
{
if(IR_GetDataFlag() || IR_GetRepeatFlag()) //如果收到数据帧或者收到连发帧
{
Address=IR_GetAddress(); //获取遥控器地址码
Command=IR_GetCommand(); //获取遥控器命令码
LCD_ShowHexNum(2,1,Address,2); //显示遥控器地址码
LCD_ShowHexNum(2,7,Command,2); //显示遥控器命令码
if(Command==IR_VOL_MINUS) //如果遥控器VOL-按键按下
{
Num--; //Num自减
}
if(Command==IR_VOL_ADD) //如果遥控器VOL+按键按下
{
Num++; //Num自增
}
LCD_ShowNum(2,12,Num,3); //显示Num
}
}
}
CodeDemo:https://github.com/zouchanglin/mcu-code/tree/main/STC89C51